Hi Alex,
Maybe you might start a thread on cnczone.com for your Kanalog build. There are similar threads for SnapAmp.
But basically very little needs to be configured in Mach3. It basically now just does the trajectory.
In Mach3 digital IO pins equate to KFLOP+Kanalog IO bits. Mach3 only allows pins upt to 127 so for bits greater than 127 subtract 128 and specify port 2 rather than port 1.
Also you really should get all your axis and hardware working and tuned in KMotion.exe before you even attempt to use Mach3. Because with a parallel port everything is configured exclusively in Mach3 (as Mach3 is doing everything) so many users attempt to start there. But with KFLOP most all the low level hardware is controlled by it so start there first.
The very first step is to just connect a Analog Amplifier to a Kanalog DAC and use Console Screen commands (ie. DAC0=200) to see if you can cause the motor to move at a controlled speed.
Regards
TK
| Group: DynoMotion |
Message: 3107 |
From: cncvalyo |
Date: 1/13/2012 |
| Subject: Re: mach configuration |
Hi,Tom
1. may i use kanalog only for128 bits or i have use kflop connector? 2.if i choose channel for dac servo i cannot send console command dac=# ?
if it is not ,so console command is working and I also checked output with voltmeter 3.where config for resolution of encoder? and max motor vel in counts? rpm?
my machine is completly assembled and still working, so I am trying to check maximum before connecting to drivers,motors thanks,
Alex > In Mach3 digital IO pins equate to KFLOP+Kanalog IO bits. Mach3 only allows pins upt to 127 so for bits greater than 127 subtract 128 and specify port 2 rather than port 1.
> Â
> Also you really should get all your axis and hardware working and tuned in KMotion.exe before you even attempt to use Mach3.  Because with a parallel port everything is configured exclusively in Mach3 (as Mach3 is doing everything) so many users attempt to start there. But with KFLOP most all the low level hardware is controlled by it so start there first.
> Â
> The very first step is to just connect a Analog Amplifier to a Kanalog DAC and use Console Screen commands (ie. DAC0=200) to see if you can cause the motor to move at a controlled speed.
> Â
> Regards
> TK
>
> From: cncvalyo customcnc@...
> To: DynoMotion@yahoogroups.com
> Sent: Thursday, January 12, 2012 1:10 PM
> Subject: [DynoMotion] mach configuration
>
>
> Â
> Hi!
> got my KFLOP and KANALOG.
> will be used to retrofit Cincinnati
> ARROW500-Acramatic2100
> motors-drivers are Kollmorgen
> have many years with Mach and steppers.
> servos are to heavy :)
> so please help
> I am trying to config Mach3 pins and Kanalog inputs-outputs.
> found totally confused.
> numbers of ports and pins in Mach ? how are them defined according to Kanalog? spindle setup is totally misunderstanding.
> motor velocity in kanalog is in inch ? counts or mm ?
> thanks in advance,
> Alex
> P.S.
> looked for answers in yahoo and CNCzone.
> found that only me so stupid ? :)
>
|
|
| Group: DynoMotion |
Message: 3111 |
From: Tom Kerekes |
Date: 1/13/2012 |
| Subject: Re: mach configuration |
Hi Alex,
Regarding:
#1 not sure what you mean. In Mach3 to use Kanalog Opto Output 0 which would be bit 144 subtract 128 and Select Port2 so specify Port2 Pin16.
#2 if a servo axis is enable it is continuously sending commands to the DAC. So any DAC command you send using the console will be immediatly overwritten. To test a DAC using console commands disable any axis using the DAC
#3 set the Resolution for the encoder in the Mach3 | Config | Ports & Pins | Encoder Page.
#4 The motor trajectory profile settings need to be set in both KMotion.exe and Mach3. First work int KMotion.exe Step Response Screen and set the axis max Velocity, Acceleration, and Jerk in units of counts and seconds. Movements such as Jogging, Homing, and any MPG will do 3rd order motion using these parameters. Later in Mach3 in the "Motor Tuning" screen the max Velocity and Acceleration will be set in units of inches/mm sec/minutes for 2nd order coordinated motions that Mach3 creates.
Regards
Tom Kerekes
| Group: DynoMotion |
Message: 3112 |
From: cncvalyo |
Date: 1/14/2012 |
| Subject: Re: mach configuration |
|
Hi Tom,
Thanks for reply
#1
I mean electrical/hardware connection to Kanalog/Kflop.(not in Mach)
Do I need use both of them or I can connect to Kanalog only?
#0
I opened thread in CNCZONE , will be updated :-)
P.s.
Please check/revew manual/help files:most of info about kmotion card or snapamp, not about Kanalog-Kflop tandem.
Thanks again
Alex
|
|
| Group: DynoMotion |
Message: 3115 |
From: Tom Kerekes |
Date: 1/14/2012 |
| Subject: Re: mach configuration |
Hi Alex,
Still don't fully understand the question. But to make use of Kanalog you must have a KFLOP board also. With the two boards connected together you can use the IO on Kanalog, KFLOP, or both.
Regards
TK
| Group: DynoMotion |
Message: 3516 |
From: cncvalyo |
Date: 1/27/2012 |
| Subject: Re: mach configuration |
Hi Tom, machine is moving and spindle is working. still have some problem connecting inputs. i need about 25-30 inputs. 1. I have Kanalog-Kflop boards connected 2. I use only 4 encoders. what is the best way to get maximum inputs from both boards ? please write what are connectors numbers ,pins on connectors , and maximum usable voltage . thank in advance , Alex
P.S. going to order another set of your boards to retrofit big stone cutting CNC.
--- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@...> wrote:
>
> Hi Alex,
>
> Still don't fully understand the question. But to make use of Kanalog you must have a KFLOP board also. With the two boards connected together you can use the IO on Kanalog, KFLOP, or both.
>
> Regards
> TK
>
> From: cncvalyo customcnc@...
> To: DynoMotion@yahoogroups.com
> Sent: Saturday, January 14, 2012 1:00 AM
> Subject: [DynoMotion] Re: mach configuration
>
>
>
>
>
> Hi Tom,
> Thanks for reply
> #1
> I mean electrical/hardware connection to Kanalog/Kflop.(not in Mach)
> Do I need use both of them or I can connect to Kanalog only?
>
> #0
> I opened thread in CNCZONE , will be updated :-)
>
> P.s.
> Please check/revew manual/help files:most of info about kmotion card or snapamp, not about Kanalog-Kflop tandem.
> Thanks again
> Alex
>
|
|
| Group: DynoMotion |
Message: 3520 |
From: Tom Kerekes |
Date: 1/28/2012 |
| Subject: Re: mach configuration |
Hi Alex,
Congrats!
Regarding the inputs:
Kanalog JP15 has 8 5-24V opto isolated inouts
Kanalog JP12 has 8 3.3V inputs
KFLOP JP4 has 10 3.3V inputs
KFLOP JP6 has 10 3.3V inputs
KFLOP JP5 has 8 3.3V inputs (if you are not using Kanalog JP2 you can use these).
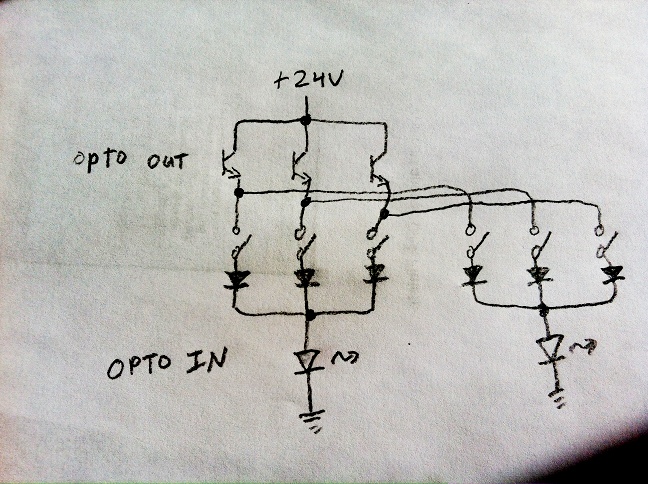
As a side note, if your inputs are simple isolated switches and speed isn't very high (<1ms) then you might consider using a multiplexing scheme driven from a User Program. So for example 4 Kanalog opto outputs could be used to individually select "banks" of 8 switches connected in parallel to the 8 opto inputs. Thus 4 outputs and 8 inputs could yield a total of 4x8=32 opto isolated 24V inputs. You would need a diode in series with each switch.
Regards
TK
| Group: DynoMotion |
Message: 3555 |
From: cncvalyo |
Date: 1/29/2012 |
| Subject: Re: mach configuration |
thanks
mare info, than I can eat :)
so it's like keyboard matrix? or more complicated ?
regards,
Alex
> As a side note, if your inputs are simple isolated switches and speed isn't very high (<1ms) then you might consider using a multiplexing scheme driven from a User Program. So for example 4 Kanalog opto outputs could be used to individually select "banks" of 8 switches connected in parallel to the 8 opto inputs. Thus 4 outputs and 8 inputs could yield a total of 4x8=32 opto isolated 24V inputs. You would need a diode in series with each switch.  |
|
| Group: DynoMotion |
Message: 3560 |
From: Tom Kerekes |
Date: 1/29/2012 |
| Subject: Re: mach configuration |
Hi Alex,
Yes like a keyboard matrix - but to be able to handle any number "keys" pushed at the same time diodes are needed.
See the attached diagram. Is shows 3 outputs and 2 inputs to handle 6 switches. If you replicated the circuit going to the right for 8 inputs (only 2 shown) that would allow 8x3=24 swiches.
Regards
TK
| Group: DynoMotion |
Message: 4180 |
From: Alexander |
Date: 3/6/2012 |
| Subject: Re: mach configuration |
Hi Tom!
1.
i see, that when homing via Mach I get fixed velocity.
so how can I change it .
I tried ch2->Vel,ch2->maxout ...etc
the same result (moves very slowly)
in other mode it works as expected
2.
i found different results in
while(ReadBit(#));
and
for(;;)
{
if ReadBit(#)break ;
}
thanks,
Alex
> #4 The motor trajectory profile settings need to be set in both KMotion.exe and Mach3. First work int KMotion.exe Step Response Screen and set the axis max Velocity, Acceleration, and Jerk in units of counts and seconds. Movements such as Jogging, Homing, and any MPG will do 3rd order motion using these parameters. Later in Mach3 in the "Motor Tuning" screen the max Velocity and Acceleration will be set in units of inches/mm sec/minutes for 2nd order coordinated motions that Mach3 creates. |
|
| Group: DynoMotion |
Message: 4181 |
From: Tom Kerekes |
Date: 3/6/2012 |
| Subject: Re: mach configuration |
HI Alex,
#1 Your Home program will contain a line such as:
Jog(X,YYY);
X is the axis channel to move at constant velocity YYY is the velocity in counts/sec
#2 the first example will stay in the loop while the bit is true
the second example is the opposite. It will break out of the loop when the bit is true.
The C language has a "not"operator which is the ! symbol. So for example to stay in the loop when false use:
while(!ReadBit(#));
Regards TK
| Group: DynoMotion |
Message: 4185 |
From: Alexander |
Date: 3/6/2012 |
| Subject: Re: mach configuration |
You are right: but different yyy i got the same feed 2. i mean timing of loop is different regards --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@...> wrote:
>
> HI Alex,
>
> #1 Your Home program will contain a line such as:
>
> Jog(X,YYY);
>
> X is the axis channel to move at constant velocity
> YYY Â is the velocity in counts/sec
>
> #2 the first example will stay in the loop while the bit is true
>
> the second example is the opposite. Â It will break out of the loop when the bit is true.
>
> The C language has a "not"operator which is the ! symbol. Â So for example to stay in the loop when false use:
>
> while(!ReadBit(#));
>
> Â
> Regards
> TK
>
> ________________________________
> From: Alexander customcnc@...
> To: DynoMotion@yahoogroups.com
> Sent: Tuesday, March 6, 2012 5:21 PM
> Subject: [DynoMotion] Re: mach configuration
>
>
> Â
> Hi Tom!
> 1.
> i see, that when homing via Mach I get fixed velocity.
> so how can I change it .
> I tried ch2->Vel,ch2->maxout ...etc
> the same result (moves very slowly)
> in other mode it works as expected
>
> 2.
> i found different results in
> while(ReadBit(#));
>
> and
>
> for(;;)
> {
> if ReadBit(#)break ;
> }
> thanks,
> Alex
>
> > #4 The motor trajectory profile settings need to be set in both KMotion.exe and Mach3.ÃÂ First work int KMotion.exe Step Response Screen and set the axis max Velocity, Acceleration, and Jerk in units of counts and seconds.ÃÂ Movements such as Jogging, Homing, and any MPG will do 3rd order motion using these parameters.ÃÂ Later in Mach3 in the "Motor Tuning" screen the max Velocity and Acceleration will be set in units of inches/mm sec/minutes for 2nd order coordinated motions that Mach3 creates.
>
|
|
| | | | | | | | | | | |
{kind=link}